
服务支持
产品中心
联系我们

深圳市东么川伺服控制技术有限公司
电话:13316379101
邮箱:1355229533@qq.com
地址:深圳市龙华区民治街道樟坑社区青创城A栋B502
步进电机力矩选择与力矩计算公式
发布时间:2020-09-14 09:03:43
步进电机力矩选择:
1)转动惯量计算
在旋转运动中,物体的转动惯量J对应于直线运动中的物体质量。要计算系统在加速过程中产生的动态载荷,就必须计算物体的转动惯量J和角加速度e,然后得惯性力矩T=Je。
物体的转动惯量为: ,式中:dV为体积元,r为物体密度,r为体积元与转轴的距离。单位:kgm2。
,式中:dV为体积元,r为物体密度,r为体积元与转轴的距离。单位:kgm2。
如图17所示,一个质点的质量为m,距旋转轴的距离为r,其转动惯量为:
J = m r2
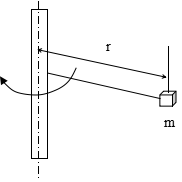
图17 质点的转动惯量
常用材质密度
a)滚珠丝杠

b)齿条和小齿轮·传送带·链条传动

c)旋转体·转盘驱动

2)加速度计算
控制系统要定位准确,物体运动必须有加减速过程,如下图所示。

已知加速时间t、最大速度Vmax,很容易算出电机的角加速度:

3)电机力矩计算:
其中:TL为系统外力折算到电机上的力矩;
h为传动系统的效率。
常用机构的机械效率η
根据计算出的力矩T再加上一定的安全系数,即可选电机型号。
1)转动惯量计算
在旋转运动中,物体的转动惯量J对应于直线运动中的物体质量。要计算系统在加速过程中产生的动态载荷,就必须计算物体的转动惯量J和角加速度e,然后得惯性力矩T=Je。
物体的转动惯量为:
,式中:dV为体积元,r为物体密度,r为体积元与转轴的距离。单位:kgm2。如图17所示,一个质点的质量为m,距旋转轴的距离为r,其转动惯量为:
J = m r2
图17 质点的转动惯量
常用材质密度
| 材质 | 密度: kg/m3 |
| 铜 | 8.96×103 |
| 黄铜 | 8.54×103 |
| 不锈钢 | 7.91×103 |
| 铁 | 7.85×103 |
| 铝 | 2.7×103 |
| 聚缩醛 | 1.43×103 |
a)滚珠丝杠
b)齿条和小齿轮·传送带·链条传动
c)旋转体·转盘驱动
2)加速度计算
控制系统要定位准确,物体运动必须有加减速过程,如下图所示。
已知加速时间t、最大速度Vmax,很容易算出电机的角加速度:
3)电机力矩计算:
其中:TL为系统外力折算到电机上的力矩;
h为传动系统的效率。
常用机构的机械效率η
| 机构 | 机械效率 |
| 滑动丝杠 | 0.5~0.8 |
| 滚珠丝杠 | 0.9 |
| 齿条和齿轮 | 0.8 |
| 齿轮减速器 | 0.8~0.95 |
| 蜗轮减速器(起动) | 0.5~0.7 |
| 蜗轮减速器(运行中) | 0.6~0.8 |
| 皮带传动 | 0.95 |
| 链条传动 | 0.9 |
根据计算出的力矩T再加上一定的安全系数,即可选电机型号。
- 上一篇:86无刷电机接线图,安装尺寸图
- 下一篇:步进电机主要参数的含义介绍
产品推荐:两相步进电机





产品推荐:无刷电机








产品推荐:两相步进驱动器








产品推荐:直流无刷驱动器






 地址 ADDRESS
地址 ADDRESS