
服务支持
产品中心
联系我们

深圳市东么川伺服控制技术有限公司
电话:13316379101
邮箱:1355229533@qq.com
地址:深圳市龙华区民治街道樟坑社区青创城A栋B502
介绍步进电机的具体特点
发布时间:2020-10-12 07:32:31
1)一般步进电机的精度为步距角的3-5%,且不累积。
2)步进电机外表允许的最高温度。
步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机
外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都
在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90
度完全正常。
3)步进电机的力矩会随转速的升高而下降。
当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。矩频特性曲线横坐标是转速,纵坐标是转矩,它反映了电机的转速与转矩的关系,是选用电机的主要依据。以下是一种电机的矩频特性曲线。
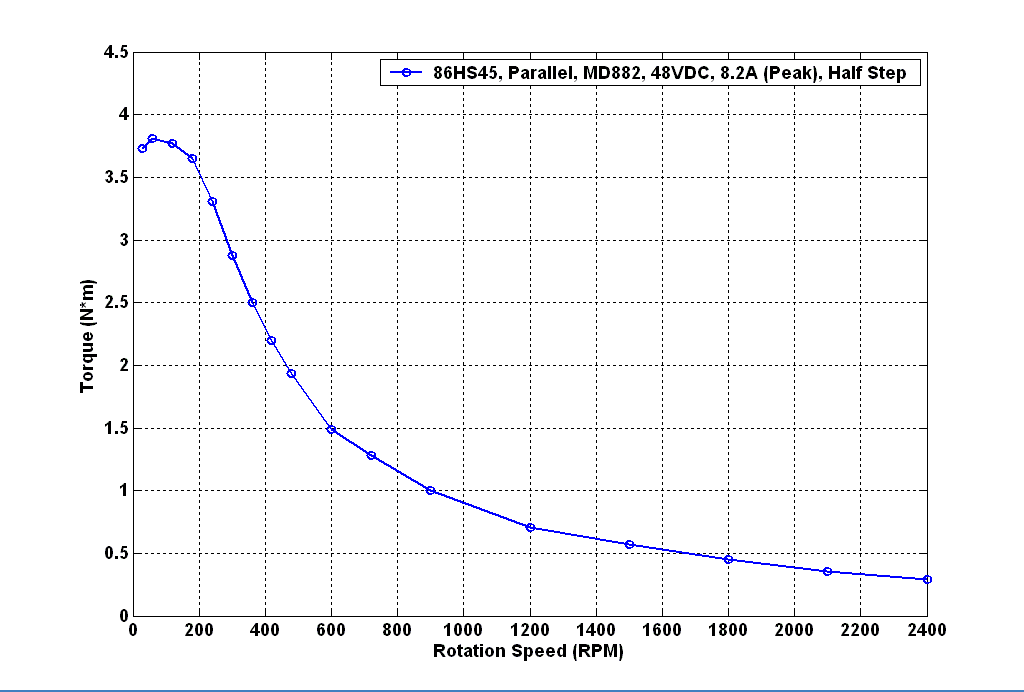
重要公式:U=E+L(di/dt)+I*R。
一般在电机达到600RPM以上时,绕组实际电流已比驱动器设定值小很多,所以力矩相应有较大下降,有可能会出现丢步或堵转。一般来说,900RPM以上的应用须特别注意高速力矩问题。
4)步进电机低速时可以正常运转,但若高于一定速度就无法启动,并伴有啸叫声。步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。在有负载的情况下,启动频率应更低。如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。
5)低频振动特性 步进电动机以连续的步距状态边移动边重复运转。其步距状态的移动会产生如下所示的 1 步距响应。
①停止状态的步进电动机输入 1 脉冲时,会朝下一个步距角进行加速。
②加速后的电动机通过步距角并超过某个角度后,则会朝反方向被拉回。
③如此衰减振动后,将于既定的步距角度位置上停止下来。
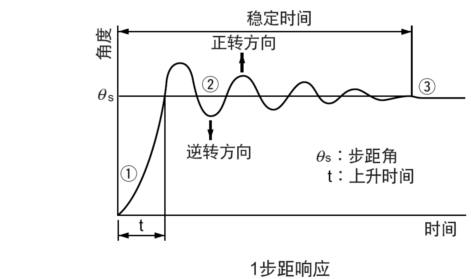
产生此一衰减振动的步距状态的移动即为低速旋转时的振动原因。 振动特性所表现的即是步进电动机旋转中的振动的大小。 振动幅度越小旋转越顺畅。
步进电机均有固定的共振区域,二、四相感应子式步进电机的共振区一般在180-250pps之间(步距角1.8度)。电机驱动电压越高,电机电流越大,负载越轻,电机体积越小,则共振区向上偏移,反之亦然。为使电机输出力矩大,不失步和整个系统的噪音降低,一般工作点均应偏移共振区较多。步进电机低速转动时振动和噪声大是其固有的缺点,克服两相混合式步进电机在低速运转时的振动和噪声方法:
A.如步进电机正好工作在共振区,可通过改变减速比等机械传动避开共振区;
B.采用带有细分功能的驱动器,这是最常用的、最简便的方法;
C.换成步距角更小的步进电机,如三相或五相步进电机;
D.换成交流伺服电机,几乎可以完全克服震动和噪声,但成本较高;
E.在电机轴上加磁性阻尼器,市场上已有这种产品,但机械结构改变较大。
6)中高频稳定性
电机的固有频率估算值:
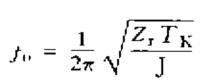
式中:Zr 为转子齿数;TK 为电机转矩;J 为转子转动贯量
从控制脉冲频率的角度讲,其基波在fCP =fO 处引起的谐振, 在振动特性上一般有较明显的反
映,分辨率较低时更为突出,分辨率增高时情况改善。在fO的倍数频率点常常出现谐振点,如2 fO、3 fO 、4 fO、? 等处。
2)步进电机外表允许的最高温度。
步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机
外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都
在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90
度完全正常。
3)步进电机的力矩会随转速的升高而下降。
当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。矩频特性曲线横坐标是转速,纵坐标是转矩,它反映了电机的转速与转矩的关系,是选用电机的主要依据。以下是一种电机的矩频特性曲线。
重要公式:U=E+L(di/dt)+I*R。
一般在电机达到600RPM以上时,绕组实际电流已比驱动器设定值小很多,所以力矩相应有较大下降,有可能会出现丢步或堵转。一般来说,900RPM以上的应用须特别注意高速力矩问题。
4)步进电机低速时可以正常运转,但若高于一定速度就无法启动,并伴有啸叫声。步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。在有负载的情况下,启动频率应更低。如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。
5)低频振动特性 步进电动机以连续的步距状态边移动边重复运转。其步距状态的移动会产生如下所示的 1 步距响应。
①停止状态的步进电动机输入 1 脉冲时,会朝下一个步距角进行加速。
②加速后的电动机通过步距角并超过某个角度后,则会朝反方向被拉回。
③如此衰减振动后,将于既定的步距角度位置上停止下来。
产生此一衰减振动的步距状态的移动即为低速旋转时的振动原因。 振动特性所表现的即是步进电动机旋转中的振动的大小。 振动幅度越小旋转越顺畅。
步进电机均有固定的共振区域,二、四相感应子式步进电机的共振区一般在180-250pps之间(步距角1.8度)。电机驱动电压越高,电机电流越大,负载越轻,电机体积越小,则共振区向上偏移,反之亦然。为使电机输出力矩大,不失步和整个系统的噪音降低,一般工作点均应偏移共振区较多。步进电机低速转动时振动和噪声大是其固有的缺点,克服两相混合式步进电机在低速运转时的振动和噪声方法:
A.如步进电机正好工作在共振区,可通过改变减速比等机械传动避开共振区;
B.采用带有细分功能的驱动器,这是最常用的、最简便的方法;
C.换成步距角更小的步进电机,如三相或五相步进电机;
D.换成交流伺服电机,几乎可以完全克服震动和噪声,但成本较高;
E.在电机轴上加磁性阻尼器,市场上已有这种产品,但机械结构改变较大。
6)中高频稳定性
电机的固有频率估算值:
式中:Zr 为转子齿数;TK 为电机转矩;J 为转子转动贯量
从控制脉冲频率的角度讲,其基波在fCP =fO 处引起的谐振, 在振动特性上一般有较明显的反
映,分辨率较低时更为突出,分辨率增高时情况改善。在fO的倍数频率点常常出现谐振点,如2 fO、3 fO 、4 fO、? 等处。
- 上一篇:图文介绍步进电机基本工作原理
- 下一篇:丝杆步进电机工作原理和用途
产品推荐:两相步进电机





产品推荐:无刷电机








产品推荐:两相步进驱动器








产品推荐:直流无刷驱动器






 地址 ADDRESS
地址 ADDRESS