

深圳市东么川伺服控制技术有限公司
电话:13316379101
邮箱:1355229533@qq.com
地址:深圳市龙华区民治街道樟坑社区青创城A栋B502
步进电机有哪些种类,具体区别是什么
发布时间:2020-11-16 02:24:14
在机械设计中,我们经常用到步进电机。比如,用步进电机驱动同步带轴,实现直线运动。再比如,用步进电机驱动滚珠丝杠轴,也可以把旋转运动转换为直线运动。因为不需要反馈系统,所以步进电机的最大优点是,低成本下可以获得不错的精度。其实,除了机器中的运动平台,生活中也可以发现步进电机的存在。比如打印机,扫描仪,相机,ATM机,3D打印机等等。

那么,步进电机的原理是什么?
用一句话来说就是:给定子中的一组或多组线圈轮流通电,线圈中的电流产生磁场,转子为了寻找新的平衡位置,自动调整它的位置,对其磁场,从而实现运动。
你可能会说,所有电机都是这个原理,哈,没错,那么关于具体细节,我们后面慢慢用图来说。
其实此前,我对步进电机的原理了解得也不是很多,不过最近好像对各类电机有点上瘾,所以特地多了解了一些,毕竟,我们时时刻刻都会和电机打交道。
了解了之后,这不趁今天周末,我就来分享一下。
但是因为我不是做电机的,所以若有不妥,或者不完善之处,还希望业内人士能够在留言区指出,补充。
今天的主要内容包括:步进电机的种类,构造,原理,步进电机的满步半步微步控制方法,步进电机的速度扭矩特性,以及步进电机的优缺点等。
1.步进电机的类型
和其他类型的电机一样,步进电机也是由定子和转子构成。
在步进电机中,定子主要负责产生磁场,转子负责跟随磁场。
定子的主要特征包括相数,磁对数,以及线圈配置。
相数是独立线圈的数目,而磁对数表示每一相会产生多少对磁场。
2相步进电机是最常使用的,而3相,5相不常用。

左图是2相步进电机,右图是3相步进电机定子示意图
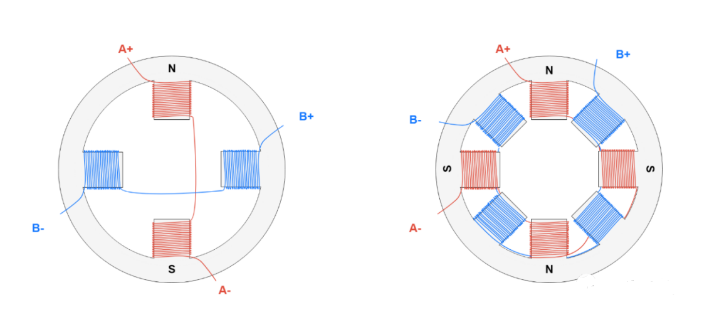
左图是2相单磁对数定子,右图是2相偶磁对数定子,字母N和S表示当A+和A-通电时,定子产生的磁场。
因为步进电机的构造会影响步距,速度,扭矩,以及控制方式。
所以,接下来我先说说几种不同步进电机的构造。
它们的区别主要在于转子是怎么做的。
(1)永磁式转子(Permanent Magnet=PM)
第一种,永磁式转子,这种是最简单,也是最便宜的。
它的结构如下图,中间的转子是用永磁铁做成。
当定子线圈通电产生磁场,转子磁铁自动对齐磁场,跟随旋转。

永磁式转子步进电机

线圈通电,中间转子自动对齐线圈产生的磁场(图片来自Microchip)

线圈通电,中间转子自动对齐线圈产生的磁场
这种结构,因为是用磁铁做转子,磁铁磁通量大,进而扭矩大,所以保证了较好的输出扭矩和制动扭矩。
所谓制动扭矩(Detent Torque),就是说,无论线圈是否通电,电机都会阻止旋转,这是因为永磁铁和定子之间的相互作用,会产生一定的扭矩,外力必须克服这个扭矩,电机才能动起来。
在电机生产厂家的产品目录中,有的也写为齿槽转矩(Cogging Torque),或者残余扭矩(Residual Torque)。
当然,有优势也就有劣势。
这种结构的不足之处在于,它的转速和步距(分辨率)不高,比如一步转动7.5°-15°,当然好处是体积可以做得很小,比如Φ20mm以下。
(2)可变磁阻式步进电机(Variable Reluctance=VR)


可变磁阻式步进电机结构
这种电机,转子是用软磁材料做成,转子多齿,不同的齿形分布,可以产生不同的分辨率,线圈通电吸引转子,引发转动。
这种结构的好处是,可以实现高速及高分辨率,而且没有制动扭矩,但是扭矩比永磁式小,不适用于小电机。
因为没有永磁铁,所以可以在有强磁场的环境中,使用这种电机。
(3)混合型(The Hybrid Design=HB)
混合型,看名字也大概知晓其含义,就是永磁式和可变磁阻式的混合。
这种电机的典型结构如下图。

永磁和可变磁阻混合型步进电机

混合型步进电机结构

混合型步进电机的运动原理
转子带两个齿冠,齿冠在轴向被磁化,一个齿冠是北极,一个是南极。
这种配置,使得混合型步进电机既有永磁式的优点,又有可变磁阻式的优点,特别是拥有高分辨率,高速,高扭矩。
混合型步进电机,通常每圈有200步,也就是步距为360/200=1.8°,这种类型的电机受限于制造,目前最小只能做到Φ19mm。
当然,好特性需要更复杂的结构和控制,所以价格也更贵。
(4)单极步进电机和双极步进电机
按照连接方式的不同,步进电机又可以分为单极步进电机(Unipolar Stepper Motor),和双极步进电机(Bipolar Stepper Motor)。

单极和双极步进电机的引线方法

单极和双极步进电机的引线方法

单极步进电机驱动电路
在单极步进电机中,一根引线连接到线圈的中心点,这样连线的好处是,可以用相对简单的电路,来控制电流的方向。
如上图所示,中央引线Am连接到输入电压Vin中,如果开关1处于激活状态,则电流从Am流到A+。
如果开关2处于激活状态,则电流会从AM流到A-,从而在相反的方向上产生磁场。
这种方法的好处是,可以简化驱动电路,因为仅需要两个半导体开关,但缺点是一次仅使用电机线圈的一半,这意味着,如果在线圈中流过相同的电流,磁场强度将会减半,另外,由于必须连接更多的引线,所以这种电机更难以构造。

双极步进电机驱动电路

在双极步进电机中,每个线圈只有两个引线,要控制方向,必须使用H桥电路。
如上图所示,如果开关1和4处于激活状态,则电流从A+流向A-,而如果开关2和3处于激活状态,则电流从A-流向A+,在相反的方向上产生磁场。
这种连线方案,缺点是需要更复杂的驱动电路,但优点是可以实现电机最大扭矩。和单极步进电机相比,此种连线可以提高40%的扭矩,也就是单极步进电机的√2倍。
产品推荐:两相步进电机





产品推荐:无刷电机








产品推荐:两相步进驱动器








产品推荐:直流无刷驱动器






 地址 ADDRESS
地址 ADDRESS