

深圳市东么川伺服控制技术有限公司
电话:13316379101
邮箱:1355229533@qq.com
地址:深圳市龙华区民治街道樟坑社区青创城A栋B502
图文介绍步进电机的满步、半步、微步驱动原理
发布时间:2020-11-16 03:25:13
步进电机有三种驱动模式,即满步,半步,还有微步驱动。
(1)满步驱动(Full-step)
满步驱动,就是一次走一个步距,这是一种常用的驱动方式。
根据通电相数,满步驱动又分成两种,一种是单相通电驱动,一种是双相通电驱动。
为简单起见,以永磁式步进电机为例来说明,如下图。

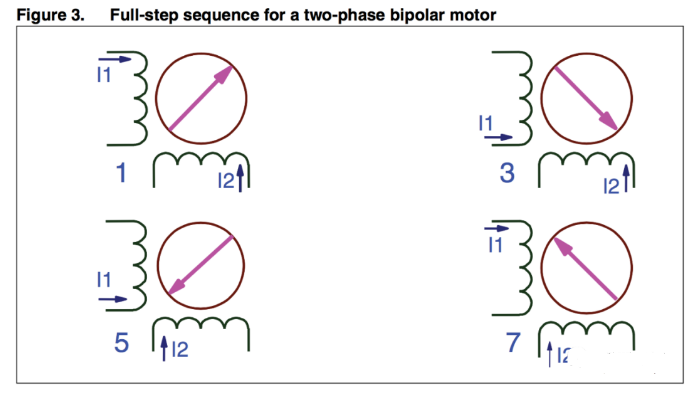
两相满步驱动时的线圈通电顺序,一般在产品目录中,供应商用这种表示方法。

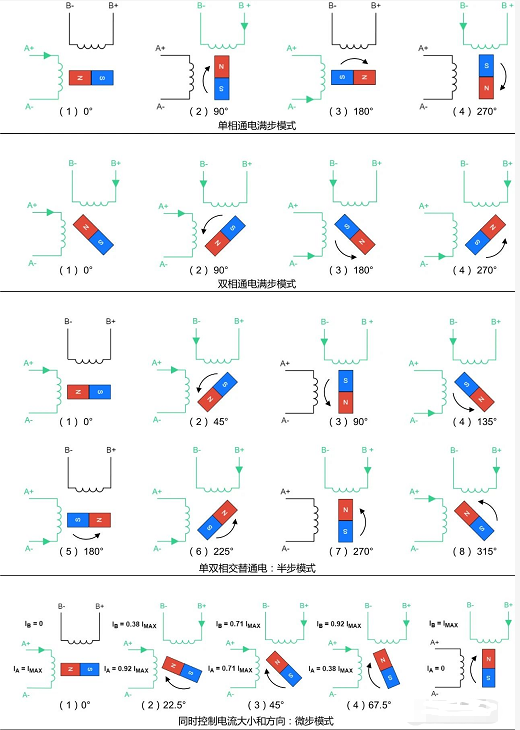
单相和双相通电满步驱动概念
(2)半步驱动(Half-step)
半步驱动,就是一次只走半个步距。
实现方式是单相和双相交替通电,原理如下图。
半步驱动的好处是提高分辨率,但是缺点是扭矩只有满步驱动的70%,当然,也可以通过优化线圈中电流大小,来提高半步驱动扭矩。

半步驱动:单相双相交替通电

两相电机半步驱动:单相和双相交替通电

单相和双相交替通电,实现半步驱动的概念。单相通电时,线圈产生磁场,磁铁因为磁场的吸引力,指向通电的线圈。双相通电时,因为两个线圈都产生磁场,所以合成磁场让转子处于中间平衡位置。
(3)微步驱动(Microstepping)
因为电流大小不同,将会导致线圈产生的磁场强度不同,从而导致转子的平衡位置发生变化,这就是微步驱动的原理。

微步驱动原理:A线圈最开始有最大电流,而B线圈此时电流为零,定子指向A线圈。A线圈慢慢减小电流, B线圈慢慢增加电流,因为磁场平衡位置的变化,定子慢步向B线圈转动。宏观来看,A线圈中电流变化接近Cos曲线,B线圈电流变化接近Sin曲线,直到A线圈电流减为零,而B线圈电流达到最大值,定子指向B线圈。

微步驱动电流示意图:电流每一步的变化的大小,决定了微步运动的大小,上图是1/4,1/8,1/16微步电流变化示意图

微步驱动电流示意图

微步运动举例:在图1中,A线圈通满电流,图2中A线圈通最大电流的0.92倍,而B线圈通最大电流的0.38倍,实现22.5°旋转。同理,图3中,A和B线圈同时通最大电流的0.71倍,可以实现45°旋转。
比如,一个200步的步进电机,如果用满电流驱动,那么它的步距是1.8°,而如果用一半的电流驱动,那么它的步距将会是0.9°。
当然还可以继续细分,一般地,步进电机一个步距可以细分256步。
步数越多,可以获得越平滑的运动,噪声也越小,不容易失步(丢步),但是代价就是扭矩大大减小。
所谓失步,就是电机没有按照命令走相应的步数,关于失步,后一小结中,我们专门来了解。
比如,当把一步分成16步时,扭矩仅为保持扭矩的10%左右。

微步驱动保持扭矩和步数的关系
设计时需要留够余量,比如一般会考虑负载的加减速,运动线的拖拽力,还有步进电机本身的制动扭矩(Detent Torque,由于定子和转子之间的磁力,产生的扭矩,一般是保持扭矩的5%-20%),摩擦扭矩等。
当微步扭矩超过负载扭矩和摩擦扭矩及制动扭矩之和时,连续的微步才会实现。
有时制动扭矩起正作用,比如当电动机停止时,制动转矩可能是有益的,因为它会抵消运动中的转子的动量,因此更高的制动转矩,将有助于电动机更快地停止。
也就是说,在微步模式下,电机不一定会动,这就会打乱全局精度。
所以,虽然微步可以实现更高的分辨率,但是并不一定能带来更好的精度。
你可能要问了,既然不一定能提高精度,那么为什么还要有微步驱动模式呢?
其实,微步驱动的主要作用在于减小机械噪声,减小共振,减小机械传动结构的磨损,实现更平滑的运动。
有研究表明,只有当载荷非常轻,微细步的扭矩足以驱动负载时,才可以提高精度。
实际上,把每整步细分成无限微步,就是两相永磁交流电机的运行原理,这个今天就不说了,日后我再开一篇日记来写吧。
现在,一些生产厂家,生产微步电机的努力方向,就是以牺牲保持扭矩为代价,减小制动扭矩,使得扭矩和位置关系更接近Sin曲线,而扭矩电流曲线更趋向线性。
我感觉这里啰嗦得够多了。
最后,关于满步,半步,微步驱动,这里有一张小结图。
看图,一下就明白了,还犹豫什么,我保存了。
满步,半步,微步驱动示意图
- 上一篇:步进电机有哪些种类,具体区别是什么
- 下一篇:步进电机的速度扭矩曲线图介绍
产品推荐:两相步进电机





产品推荐:无刷电机








产品推荐:两相步进驱动器








产品推荐:直流无刷驱动器






 地址 ADDRESS
地址 ADDRESS