
新闻中心
产品中心
联系我们

深圳市东么川伺服控制技术有限公司
电话:13316379101
邮箱:1355229533@qq.com
地址:深圳市龙华区民治街道樟坑社区青创城A栋B502
步进电机的动态特性和静态特性!
发布时间:2020-12-04 09:29:30
步进电机的特性分为静态特性和动态特性。静态特性:电机静止时的角度变化特性。与位置的精度有关。动态特性:马达启动和旋转时的特性。与响应特性有关,受电机驱动方式的影响。
静态特性。
角度-矩特性(θ-T 特性)
通过恒定电流(额定电流)激励马达的同时,在马达轴上施加外力形成角位移,角位移正常与矩t的关系称为角度-矩特性或正常(图1)。
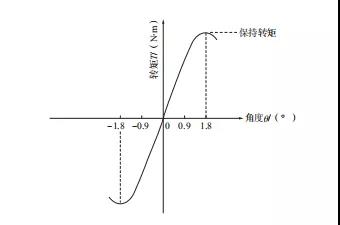
图1。
此时产生的最大扭矩称为最大静止扭矩(保持扭矩)。该参数一般在一相励磁电流下测定,但也可根据需要测定二相励磁电流下的相应特性。是不使用驱动电路就能测量的参数,是马达本身的基本特性。
定位转矩(齿槽转矩)
在步进电机中,在断电状态下外力旋转电机轴产生的最大扭矩称为定位扭矩(无激励磁维持扭矩)。其原理与无刷直流电机中的齿槽扭矩相同,但在步进电机中,我们曾经很乐意利用它来抑制断电状态下转子的旋转,由于这一历史原因,它通常被称为定位扭矩。近年来,由于提高位置精度、减少振动和噪音等需求,步进电机制造多采用上述游标法,该扭矩也越来越小。
角度精度
步进电机的最大的特点是,它能够以一定角度步进旋转和停止,因此理想的步进 电机每次停止都停在精确的步进角位置上。然而,因为制造时的机械尺寸精度等原因,电机的实际静止位置和理论上的停止 位置总会存在一定误差。用来表示电机在这方面的角度精度的度量值中,静止角度误差是最常见的。此外, 用另一种算法计算得到的步进角误差也会被用来衡量角度精度。◎ 静止角度误差(位置精度) 以一个随机位置为原点,让电机步进旋转一周(机械角 360°),按图 2测 量每一步的实际静止位置与理论停止位置之间的差值。然后,从正负两个方向的最大差值求出误差范围,将其除以 2 就得到了用“± ○○°”表示的静止角度误差。此外, 也可以用这个值与基本步进角的百分数比“± □□ %”来表示误差的大小——位置 精度。这里,θs 为理论静止位置;Hmax 为滞后误差;A 为单向旋转时的静止角度误差 范围;B 为正反双方向的静止角度误差范围。静止角度误差 = ± 静止角度误差范围 / 2 步进电机的角度精度通常在基本步进角的 ±5% 左右。
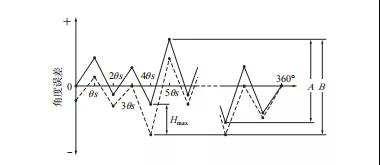
图2。
◎步进角误差(相邻角误差)与静止角误差相同,使马达旋转一周,测量每次步进转中角位置的理论值和实际值的偏差,取其中正负双方向各自的最大角度差,即步进角误差(相邻角误差)。
◎滞后误差电机正反转时,各位置的偏离角度不同,如图3所示。我们把这个偏差称为滞后误差。一般来说,标准步进电机的角度精度通常在基本步进角±5%左右。对于高分辨率、基本步角减半的马达,由于机械尺寸精度的平衡,其角度精度一般是普通马达的2倍,基本步角±10%左右。
动态特性
动态特性是利用驱动电路驱动电机时的特性,这种特性受驱动电路特性的影响,因此需要明确驱动条件。步进电机的典型动态特性有速度-扭矩特性(扭矩-频率特性),相当于普通电机的扭矩-扭矩特性(T-N特性)和启动时的瞬态响应的阶段性响应特性。
速度 - 转矩特性
步进电机的转速取决于驱动脉冲的频率,因此速度-转矩特性又称转矩-频率特性。这一特性相当于普通直流电机的转速-转矩特性。在普通直流电机转速-转矩特性图中,横轴为转矩,纵轴为转速。但在步进电机中,一般横轴为脉冲频率,纵轴为扭矩,如图3所示。我们可以看到一个空载启动区,对电机施加这个范围内的频率和扭矩,电机可以正常启动并同步旋转。另外,在空载启动区运行的马达继续增加扭矩和输入频率时,马达可以看到不会失步的旋转范围。其上限频率称为最大响应频率。该特性随着驱动电路和负荷的旋转惯性发生了很大变化。
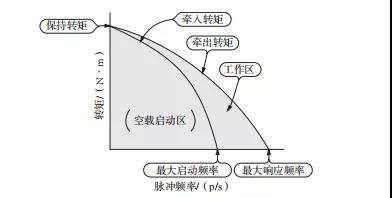
图3。
阶跃响应特性
如图4所示,当一个输入脉冲施加到步进电机上时,它会显示出阶级性的反应特性。马达在输入脉冲的作用下,向平衡位置移动时,由于转子的旋转惯量而过度,因此为了平衡,它又反转,反转为旋转惯量而下降……这样往复,经过一定的稳定时间才能到达平衡位置。因此,步进电机容易产生振动和噪音。对于连续的脉冲输入,转子的旋转往往会提前或延迟。如果转子的旋转跟不上输入脉冲信号,就会失步。
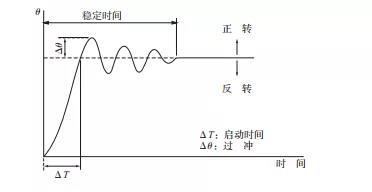
图4
- 上一篇:三相直流无刷永磁电机的连接方式
- 下一篇:干货——步进电机的三种类型详细介绍
产品推荐:两相步进电机





产品推荐:无刷电机








产品推荐:两相步进驱动器








产品推荐:直流无刷驱动器






 地址 ADDRESS
地址 ADDRESS