

深圳市东么川伺服控制技术有限公司
电话:13316379101
邮箱:1355229533@qq.com
地址:深圳市龙华区民治街道樟坑社区青创城A栋B502
介绍交流伺服驱动器的控制回路
发布时间:2021-04-25 07:41:24
控制回路与主电路的关系
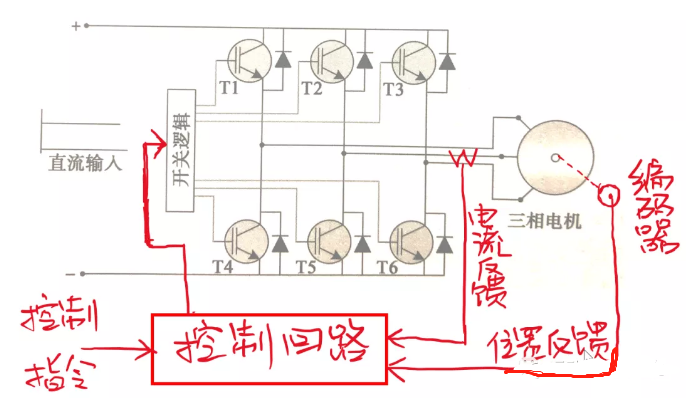
如前文交流伺服驱动器的主回路简介所述,交流伺服驱动器的控制电路通过控制逆变器的开关逻辑,实现对逆变器输出电流和电压的精确控制,从而实现对伺服电机快速、精确及稳定的控制。
伺服控制回路接受控制指令并接受伺服电机的电流反馈和位置反馈信号,计算生成控制伺服逆变器的相电压指令(开关逻辑),用于控制伺服驱动器的输出。
图1:控制回路与主回路的关系
控制电路的主要控制策略
运动控制需要精确的扭矩、速度和位置控制。伺服驱动器一般常见的有电流环、速度环和位置环三个闭环。电流环是伺服驱动器的最内环,也是必须的控制环。电流环外,伺服的控制回路有3种常见的控制策略。
1. 级联的速度环和位置环,其概念如图2所示:
图2:级联的速度环和位置环

这种结构是最常用的,位置环内嵌一个速度环,速度环内嵌电流环。这三个环分别用于控制伺服的位置、速度和扭矩。
2. 单环PID位置控制,其概念如图3所示:
图3:单环PID位置控制
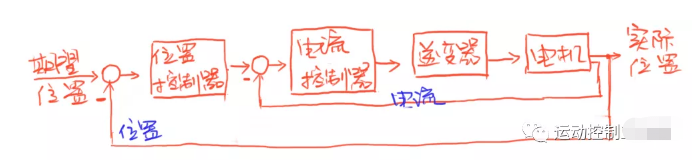
此控制策略与级联的速度环和位置环控制策略相比,没有速度环,故不能做速度控制,只能做位置和扭矩控制。
图4:带前馈控制的级联闭环
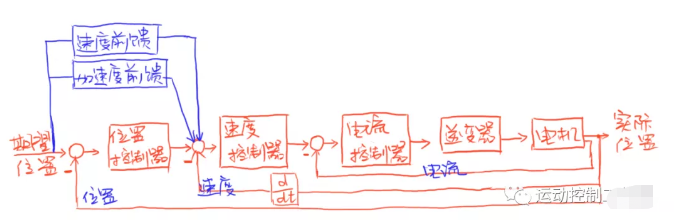
由上图可见,这种控制策略在传统级联的速度环和位置环之外,加了速度前馈和加速度前馈。此前馈在速度环和位置环之外,因而不会导致系统的不稳定。
伺服控制欲保证其快速性、稳定性和准确性,一般要求系统具有高增益。可增益过高容易引起不稳定,特别是PID控制器中的积分增益。一般在定位停止时才投入积分器,以最终消除跟踪误差。而在运动过程中误差的消除,就要借助速度前馈和加速度前馈。
速度前馈:输入速度曲线直接反馈给速度环,当速度发生突变时,系统迅速响应,从而消除跟踪误差。如速度前馈增益设置的太高,在速度曲线的加/减速区间会产生误差尖峰。
加速度前馈:通过加一个加速度前馈,可以解决速度前馈增益太高引起的超调,即误差尖峰问题,使整个系统有快速响应能力及强扰动抑制能力。
当前先进的伺服驱动器都有速度和加速度前馈功能!
控制电路三个环的简单介绍
位置环接受外部指令,并输出速度指令,作为速度环的输入。速度环输出电流指令,作为电流环的输入。所谓伺服的整定,即是对伺服三个闭环的PID整定。
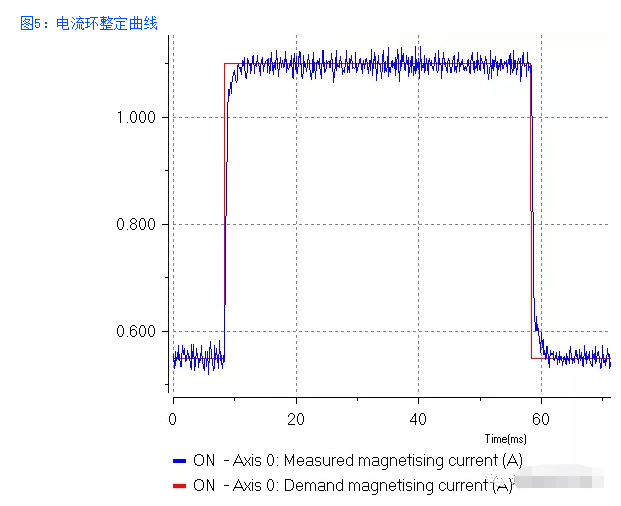
电流环:电流环是伺服的最内环,由电流环向电机的定子注入电流,实现电机的加减速控制。电流环的输入是速度环的输出,以及实时的电流反馈信号。电流环必须被首先整定,且要整定良好。因为电流环就像大楼的地基一样。电流环性能差,是无法通过速度或位置环的整定弥补的。
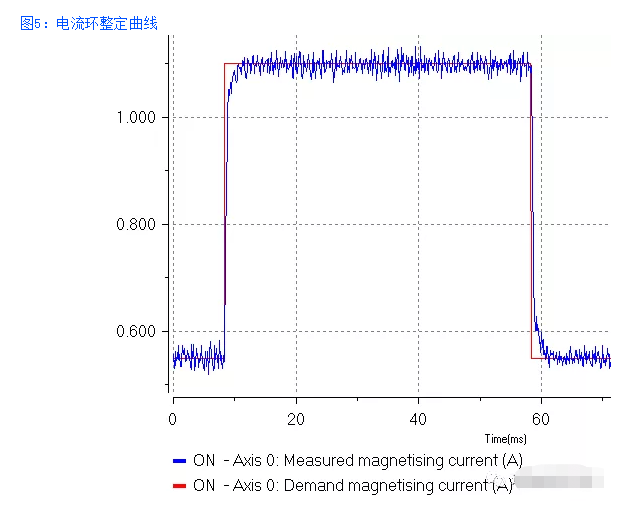
常用阶跃信号对电流环进行整定。一般情况下,阶跃响应是系统可能遇到的最糟糕的情况。位置外环产生给速度环,以及速度环产生给电流环的指令都是比阶跃信号平滑得多的指令。因此,如果系统能对阶跃信号有一个满意的响应,它在更平滑的运行条件下,响应会更好。
图5:电流环整定曲线
速度环:速度环的输入是位置环的输出,以及电机的反馈速度。速度环的输出是一个电流指令给到电流环。速度环的性能,主要考察速度跟随情况。如下图左图,增益较小,跟随误差较大。右图跟随误差要小得多。
图6:速度环整定曲线
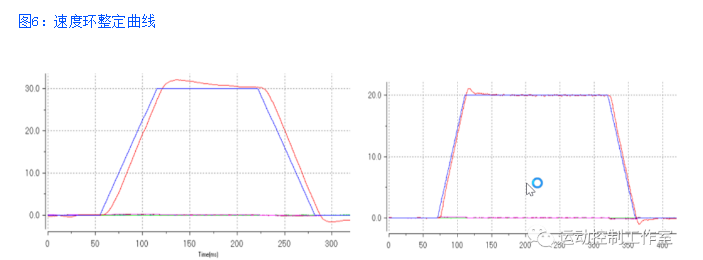
速度环整定一般采用PI策略,比例增益增大系统阻尼(抑制过冲), 积分增益提升系统响应。一般要求加减速时,速度过冲小,速度跟随快速,且匀速运动或静止时无抖动。
注:有的伺服驱动器,当采用单环PID位置控制策略时,是没有速度环的。一般认为这种控制方式可提升位置控制的控制精度。
位置环:位置环主要考察实际位置与给定位置之间的跟随误差,尤其是加减速阶段,要求跟随误差幅值小,且能快速降为0。
图7:位置环整定曲线
如上图,粉红色曲线为跟随误差,粉红色坐标为其纵坐标。其加减速阶段,最大跟随误差为0.008个用户单位,跟随误差稳定约需180ms
控制回路的几个频率参数
Profiler Rate: 控制回路接收的外部指令为期望位置,或Setposition. SetPosition由Profiler(又称轨迹规划器,或轮廓规划器)生成,直接给到位置环。Profiler以一定的频率更新给定的SetPosition指令,此频率为Profiler Rate。如由上位PLC通过EtherCAT总线控制伺服,总线周期为2ms时,其Profiler Rate为500KHz。
伺服环刷新频率:三个环都有一个反馈信号采样周期。一般最内环的采样周期最短,即刷新频率最大。对电流环而言是对霍尔元件或电流互感器采样,对速度和位置环而言,是对编码器采样。速度环的反馈信号,可由实时反馈位置的微分得到。三环的刷新频率一般由伺服驱动器默认设置。有的也可以进行更改。提升采样频率可提升驱动器性能,但会增加处理芯片的负担。
PWM开关频率:对应逆变器中,IGBT的开关频率。提升PWM开关频率有助于降低噪音,提升电流环性能。但开关元件发热上升,最大输出电流会有所下降。
总结
本文简单介绍了伺服驱动器的控制电路。首先讲述控制回路与主回路之间的关系,然后是伺服驱动器常用的控制策略,最后简述控制回路的三个闭环,以及与这几个闭环对应的几个频率参数。
伺服控制是很复杂的技术,仅PWM控制就有多种算法和策略。PID整定也是非常复杂的算法。本文仅从概念上,对交流伺服驱动器的控制电路做一个简单介绍。
- 上一篇:伺服电机选型参数参考:转速、扭矩、惯量
- 下一篇:无刷电机的快速定位与稳定控制
产品推荐:两相步进电机





产品推荐:无刷电机








产品推荐:两相步进驱动器








产品推荐:直流无刷驱动器






 地址 ADDRESS
地址 ADDRESS